
Hybrid space architectures: Designing across assurance and performance
StoryJune 16, 2026

Bill Dillard
Microchip Technology
Space systems must deliver commercial-class performance while maintaining mission-class assurance. They must evolve on commercial timelines without compromising long-term trust and must tolerate localized failures without allowing them to spread throughout the system. Hybrid architecture – high-assurance and high-performance – deliberately separates space-system functions into two domains and can effectively balance performance against irreversible mission risk.
Radiation-pedigreed electronics and commercial electronics each bring indispensable strengths to space systems and unavoidable limitations. To balance performance against irreversible mission risk, hybrid architectures deliberately separate functions into two domains. For functions where failure is rarely recoverable, the high-assurance domain preserves mission assurance by hosting command, spacecraft safety, and fault-recovery functions that must remain deterministic as environmental margins degrade operational performance. High assurance prioritizes correctness, predictability, and long-term stability. Radiation-tolerant and radiation-hard components are often used in this domain to ensure that critical functions such as power, timing, and boot memory are available, functional, and operational.
In contrast, the high-performance domain relies on highly integrated commercial silicon – CPUs, GPUs, FPGAs, and hardware accelerators – whose roadmaps are driven by terrestrial markets and advance on short timescales to elevate compute and data throughput capacity. In this domain reliability is statistical rather than deterministic and managed through monitoring and recovery rather than absolute prevention.
Today, mission demands are expanding faster than either domain can deliver independently. Autonomy highlights the issue. High performance compute is required to ingest large data fields, perform inference, and adapt behavior in real time – workloads poorly matched to traditional rad-hard processors in functionality, capability and efficiency. Yet autonomy without bounded behavior, authoritative override, and deterministic fault response is unacceptable for most government, defense, and safety-critical missions.
The trust and containment boundary
Space systems must deliver commercial-class performance while maintaining mission-class assurance. They must evolve on commercial timelines without compromising long-term trust. They must tolerate localized failures without allowing systemic propagation. Simply acknowledging two domains does not resolve fundamental problems. Who has authority under degraded conditions? How are faults contained or escalated across domains? What guarantees exist when deterministic and probabilistic systems interact? How does evolution in one domain affect assurance in the other?
Enter the trust and containment boundary (shown in Figure 1), which deliberately separates mission-critical control from high-performance computation. This boundary defines where trust diminishes and how uncertainty propagation is managed. At this boundary, rigorous design ensures that failures, timing variability, radiation-induced faults, and rapid software evolution in the performance domain cannot compromise mission objectives or system safety. Containment is not controlled by a single component but is instead an architectural construct enforced through partitioning, timing controls, integrity checks, and supervisory mechanisms that define behavior across electrical, logical, and temporal axes.
.jpg)
[Figure 1 ǀ High-level hybrid architecture showing resilience through deliberate partitioning of high-assurance functions and high-performance commercial compute. Explicit trust and containment mechanisms bound fault effects and support deterministic recovery, while verification and scenario-based testing close the assurance loop.]
The boundary is the primary mechanism by which performance domain capability is increased without inheriting unacceptable risk. The 10-dimensional framework that follows provides rigor for evaluating how much responsibility the trust and containment boundary must carry and how might be crafted to balance mission assurance against performance ambition.
An engineering framework: A 10-dimensional design space
The dimensions listed below and shown in Figure 2 form a rigorous framework around which a design practice can be structured. Hybrid architectures succeed when this space is navigated explicitly rather than implicitly.
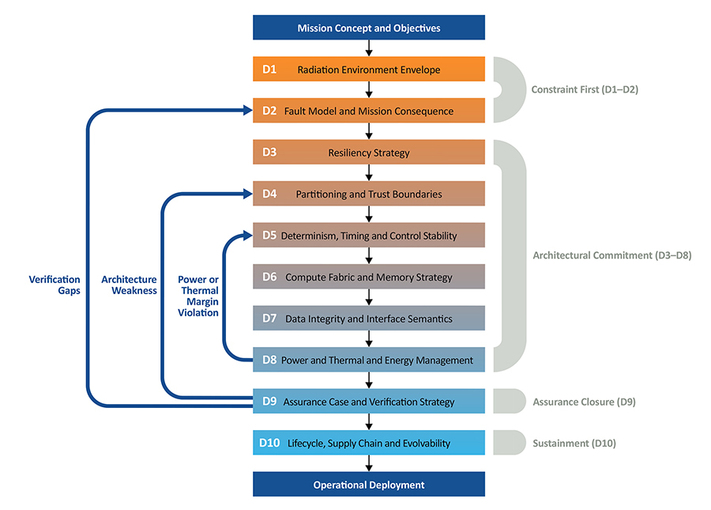
[Figure 2 ǀ Verification-driven execution framework for hybrid architectures illustrates the structured progression from environmental constraints and fault modeling to containment, recovery, and assurance decisions. Feedback loops emphasize the role of testing and scenario validation in bounding performance and enforcing deterministic behavior in mixed-assurance systems.]
- Dimension 1 – Radiation environment envelope: The radiation environment is the first architectural gate, bounding ionizing dose, single-event error (SEE) exposure, shielding, and operating modes. It delineates tolerable behaviors versus those that are unacceptable, forcing an intentional mix of hardness, mitigation, and recoverable-fault scenarios. The trust and containment boundary must remain credible under expected single-event upsets, latch-up, and interruption conditions.
- Dimension 2 – Fault model and mission consequence: Failures must be defined in mission terms – transient or permanent, detectable or latent, local or propagating, tolerable or catastrophic – and tied directly to outcomes. Expected outcomes include loss of capability, loss of data, loss of control, or unsafe state/complete mission failure. This dimension defines what the boundary must block, detect, or tolerate, establishing containment zones, recovery time limits, and degradation policies across domains.
- Dimension 3 – Resilience strategy (prevent, contain, recover): Hybrid systems require explicit strategies for prevention, containment, and recovery by using hardness, partitioning, integrity checks, supervision, resets, and reconfiguration within bounded time and state loss. The boundary becomes the execution surface for containment and recovery, which enforces supervised capture of performance-domain faults, thus preventing escape into high-assurance control.
- Dimension 4 – Partitioning and trust boundaries: Partitioning determines which functions must be intrinsically reliable and which may rely on supervision and recovery. Partitioning makes trust boundaries enforceable rather than theoretical. Credibility depends on mechanisms such as independent clocks, power domains, firewalls, memory protection, and protocol validation. This dimension is the structural blueprint for the boundary, defining how separation prevents performance-domain upsets from cascading into mission-critical functions.
- Dimension 5 – Determinism, timing, and control stability: Because platforms are fundamentally control systems, architectures must decide where determinism is mandatory and where best-effort execution is acceptable. When correctness depends on time, timing becomes part of the assurance case. The boundary must translate timing uncertainty into bounded behavior through scheduling independence, rate limiting, bounded-latency assumptions, and time-out monitoring.
- Dimension 6 – Compute fabric and memory strategy: This dimension defines where computation runs and how state survives through processor roles, memory hierarchy, error check and correct (ECC) strength, memory scrubbing, boot paths, and reset behavior, recognizing memory as a dominant reliability limiter. The boundary governs what state can cross domains, under what integrity guarantees, and how resets or reinitialization occur so performance-domain discontinuities cannot corrupt the high-assurance state.
- Dimension 7 – Data integrity and interface semantics: Hybrid systems succeed or fail at interfaces. Architectures must define trustworthiness, freshness, ordering, completeness, and explicit treatment of suspect data because radiation faults may be silent and pending. The boundary acts as a semantic and integrity enforcement layer, blocking contaminated payload data and rejecting syntactically valid but semantically unsafe information before it affects mission authority.
- Dimension 8 – Power, thermal, and energy management: High-performance compute introduces dynamic power and thermal stress, while radiation-driven protections and degradations constrain operating margins. Power domains, load shedding, thermal throttling, and energy storage effects must be architectural concerns. The boundary enforces energy and power separation so performance-domain surges, latch-up, or transient events cannot brownout, destabilize timing, or compromise assured control.
- Dimension 9 – Assurance case and verification strategy: Hybrid architectures require assurance built from analysis, testing, and fault injection, shifting proof from components to systems enforcing structure. Verification is scenario-driven and includes controlled recovery and safe nondestructive failure conditions. The boundary becomes a primary verification artifact. Evidence is focused on noninterference, containment, and bounded timing behavior via independently testable and verifiable recovery.
- Dimension 10 – Life cycle, supply chain, and evolvability: Hybrid systems must remain governable across long life cycles, balancing lead times against rapid commercial evolution with limited lifetimes through configuration control, requalification triggers, and safe architectural updates. The boundary enables performance-domain evolution without altering authority, containment rules, or assurance commitments in the high-assurance domain.
Capability in space
After traversing the design space, the two-domain model emerges not as a simplification, but as a more disciplined conclusion. The distinction between high-assurance and high-performance domains remains intact, yet it is no longer rooted in component pedigree or physical placement. Rather, it is defined by architectural responsibility: Where authority resides, how uncertainty is bounded, and how failures are predicted and recoverable. Delivering architectural responsibility falls to the trust and containment boundary, again as architecture. Done well, capability is gained not by relaxing assurance, but by relocating it from individual components to enforced architectural relationships. The result is a coherent system that is able to evolve without forfeiting control and performance.
Bill Dillard is a member of the Aerospace and Defense Group at Microchip Technology, where he serves as Technology Strategy Lead for Advanced R&D Programs. His work has centered on semicon-ductor technologies for demanding environments, with published research spanning low-temperature behavior of silicon devices, high-temperature silicon carbide (SiC) applications, and digital control of power electronics systems. Prior to joining Microchip, Bill spent 18 years in the aviation industry in roles spanning product development, sales, and government-funded programs. His work included microelectronics, inertial systems, radiation effects in semiconductors, and the design and production of FAA-certified avionics systems. Bill holds a BS and MS in electrical engineering from Auburn University.
Microchip Technology https://www.microchip.com/




